360°server
Overview
360° Analog Servo Motor: The rotation Direction and Speed can be controlled by the PWM signal; 500~1450us corresponds to the clockwise rotation, 1550~2500us corresponds to the counterclockwise rotation;
The 360° Analog Servo Motor can support Hardware Adjustment, and the rotation direction and speed can be adjusted and controlled by screwing the screw at the bottom of the hardware: Turn the screw clockwise to start moving clockwise,turn the screw counterclockwise to rotate counterclockwise.
(Please Note: The working principle of the 360° Analog Servo Motor is consistent with the traditional motors, added the direction and speed control on the basis)
Product parameter
| 应用环境Apply Environmental Conditon | ||
| 储存温度Storage Temperature Range | -30°C~80°C | |
| 运行温度Operating Temperature Range | -25°C~70°C | |
| 机械特性 Mechanical Specification | ||
| 舵机尺寸 Size | 22.4*12.5*22.8mm | |
| 重量 Weight | 10g±5% | |
| 齿轮类型 Gear type | 5 Plastic | |
| 机构极限角度 Limit angle | 360° | |
| 出力轴 Horn gear spline | 20T 直径:4.9mm | |
| 外壳 Case | Engineering plastics(PBT) | |
| 马达 Motor | Carbon brush motor | |
| 电气特性 Electrical Specification | ||
| 工作电压 Operat voltage | 4.8V | 6.0V |
| 静态电流 Idle current | mA | mA |
| 空载转速 No load speed | 110RPM | 130RPM |
| 空载电流 Runnig current | 90mA | 110mA |
| 堵转扭矩 Peak stall torque | 1.3kg.cm | 1.5kg.cm |
| 堵转电流 Stall current | 750mA±10% | 850mA±10% |
| 控制特性 Control Specification | ||
| 控制信号 Command signal | Pulse width modification | |
| 放大器类型 Amplifier type | Analog controller | |
| 脉冲宽度范围 Pulse width range | 500~2500usec | |
| 停止位置Stop position | 1450-1550usec | |
| 旋转角度 Running degree | 360 DegreeContinuous rotation. | |
| 死区宽度 Dead band width | 8 usec | |
| 旋转方向 Rotating direction | CCW(when 1500~2500usec) | |
| 旋转方向 Rotating direction | CW (when 1500~500usec) | |
Arduino uno control tutorial
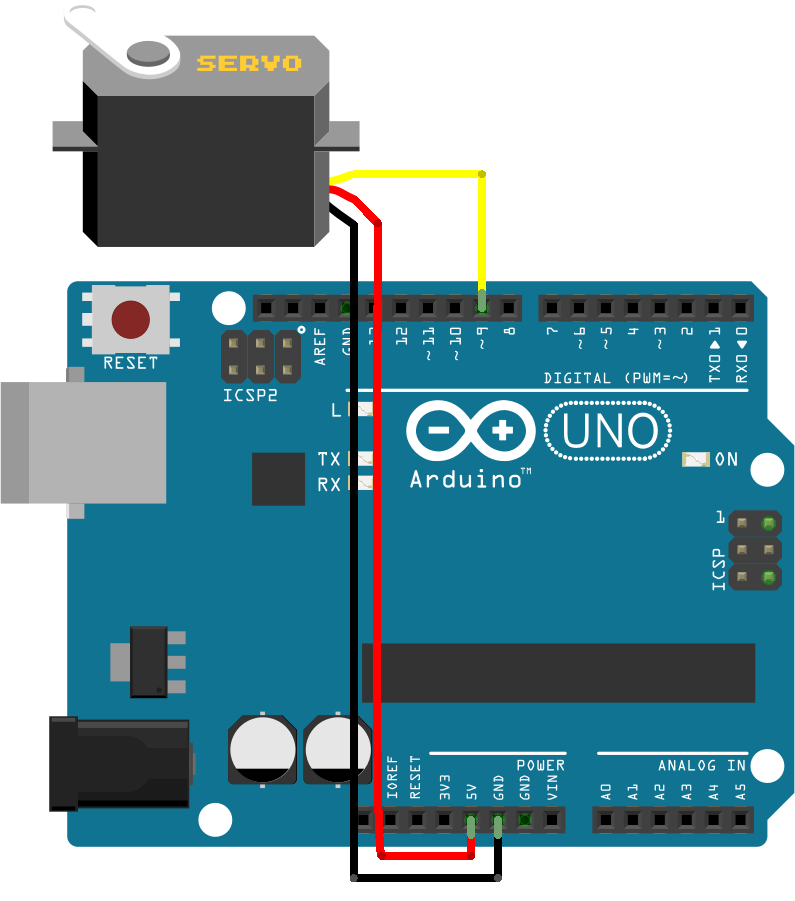
1. Line connection diagram
2. Control rotation code
| #include <Servo.h>
Servo mymotor; void setup() { mymotor.attach(9); } void loop() { mymotor.writeMicroseconds(2200); //motors rotating in clockwise direction with the highest speed; delay(5000); mymotor.writeMicroseconds(800); //motors rotating in counter-clockwise direction with the highest speed; delay(5000); mymotor.writeMicroseconds(1465); //motors stop; delay(5000); } |
3. Explanation of control effect
After successfully connecting the line and uploading the code program, the server will keep rotating counterclockwise for five seconds, then change to clockwise rotation for five seconds, and finally stop rotating and wait for five seconds; (the state will continue to cycle)
Running video:https://tinyurl.com/5c4wnmwh
If you have any questions, please contact:3356332511@qq.com
Enable comment auto-refresher